La autocorrelación espacial es igual en todo el dominio
Normalidad de los residuos/variable-respuesta
BLUP
Clarificación de conceptos
Son prácticamente lo mismo:
Universal Kriging
Kriging with external drift
Regression-Kriging
Se diferencian en el método de resolver el problema pero no en los resultados.
Predicción espacial se basa en la estimación de valores desconocido \(z(s_0)\) basado en datos conocidos \(Z(s_i)\)
\(Z_{s_i}\) estará compuesto por una parte determinística (tendencia, ej, OLS, GLS) y la variación de la correlación espacial (variograma)
Kriging
Generalidades
Los métodos de predicción espacial geoestadísticos son derivados del BLUP.
Son casos particulares en donde se considera o no la parte determinística \((\mu)\).
Los modelos de predicción espacial se basan en la autocorrelación espacial y utilizan el modelo de variograma para el cálculo de la covarianza espacial.
Kriging
Por decadas Kriging ha sido sinónimo de interpolación geoestadística.
Tiene su origen en la industria minera en los años cincuenta.
La idea original viene del ingeniero minero D.G. Krige y del estadístico H.S. Sichel.
Primera vez publicada en 1951.
Pero tomo casí una decada hasta que el matemático Frances G. Matheron derivara las formulas y estableciera todo el campo de geoestadística lineal.
Kriging Ordinario
Una versión estandar de Kriging es Kriging Ordinario
Un caso particular del modelo universal de variación donde solo considera la variación de la correlación espacial.
Por lo tanto no tenemos coeficientes de regresión y \(\beta = 0\)
Entonces, para predicción espacial hemos visto diferentes modelos de espacialización.
Inverso de la distancia
Regresión en coordenadas
Modelo de regresión lineal
Kriging Ordinario
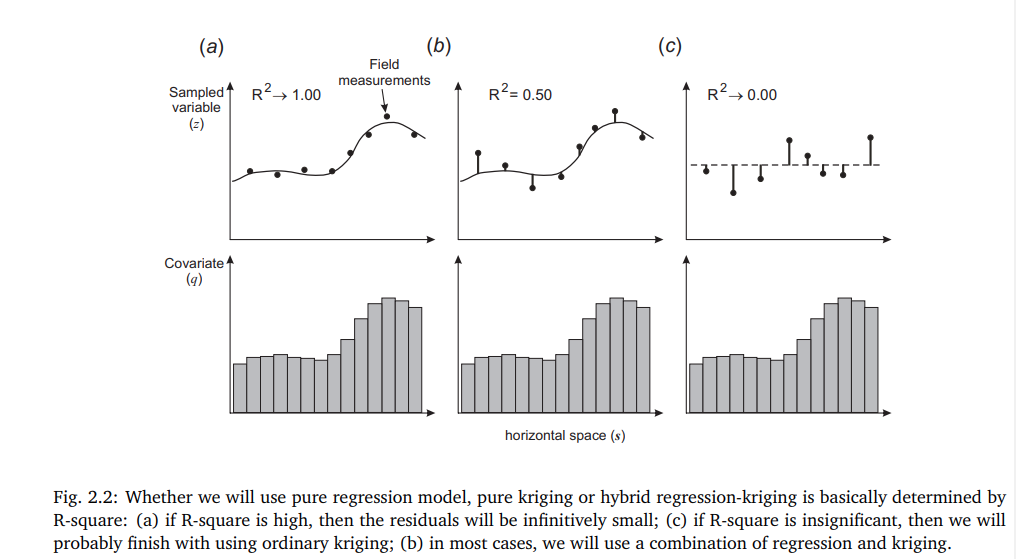
Regression-Kriging
¿Cómo sabemos que modelo de predicción aplicar?
Seleccionar la técnica de interpolación apropiada
{fig-align=‘center’)
Validación de los modelos de predicción
La varianza de estimación de OK o los modelos de regresión es la estimación estadística de la incerteza del modelo.
Pero el verdadero poder de predicción solo puede ser evaluado utilizando un set de datos de control independiente.
Así, el error de predicción es denominado como la precisión de la predicción.
La verdadera calidad de una predicción espacial puede ser evaluada de mejor forma al comparar valores estimado \((\hat z)\) con valores observados en punto de validación \((z^*)\).
Validación de los modelos de predicción
Validación cruzada
Debido a que la recolección de datos independientes es muchas veces impracticable y costoso, la validación se hace mediante validación cruzada.
Validación cruzada: se separa el set de datos original en dos set de datos
datos para calibración
datos para validación
Validación de los modelos de predicción
Validación cruzada
Hay varios tipos de estrategia de validación cruzada:
k-fold: el set original de datos es separado en k grupos iguales y cada uno es usado para validación cruzada.
leave-one-out (LOO): cada punto es usado para validación cruzada.
Jackknifing: similar a LOO pero es utilizada para evaluar el sesgo del análisis estadístico y no de las predicciones.
Validación de los modelos de predicción
Validación cruzada
LOOCV
Validación de los modelos de predicción
Validación cruzada
K-FOLD
{fig-align=‘center’)
Validación de los modelos de predicción
Validación cruzada
Generalmente calculamos las siguientes indicadores de calidad en CV
El error promedio de predicción (ME)
\[ME=\frac{1}{l}\cdot \sum_{j=1}^l\left[\hat z(s_j)-z^*(s_j)\right];\: E[ME]=0\] - La raiz cuadrada del error cuadrático medio (RMSE)
 {fig-align:“center”}
{fig-align:“center”}


 ]
] {fig-align=‘center’)
{fig-align=‘center’)
 {fig-align=‘center’)
{fig-align=‘center’)
 {fig-align=‘center’)
{fig-align=‘center’)